前々から欲しいなとは思っていたのですが、格安セールがあったので購入しました



このLEDは消せないみたいなのでちょっとまぶしい
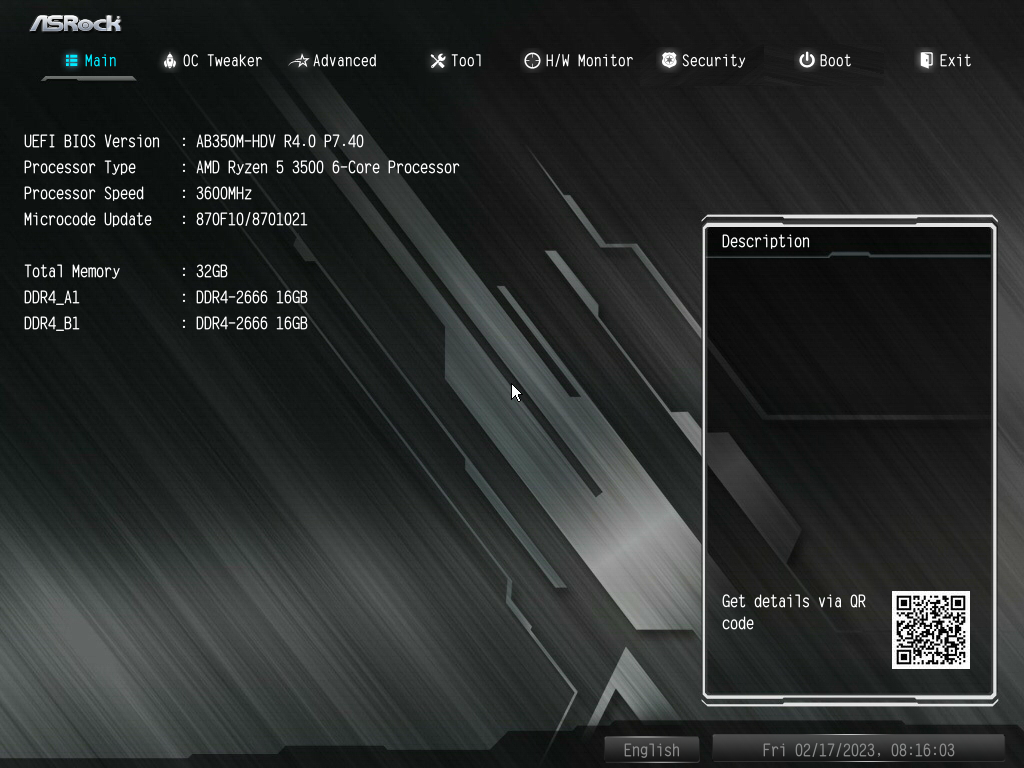
セットアップ
- Intel ARC A750ではResizable BAR有効にしないと性能が悪くなるとのこと
- AsRock AB350-HDV R4.0 P7.40での設定例
- Compatibility Support Module(互換性サポートモジュール)の無効化

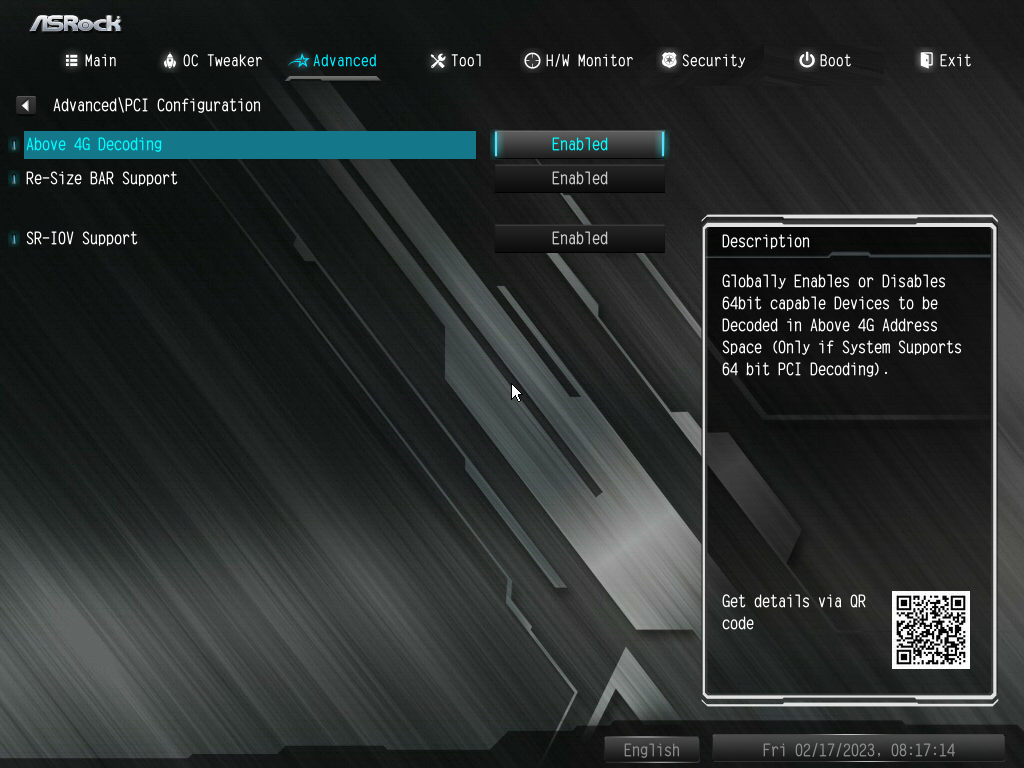
- Resizable BARの設定
- Above 4G Decording : Enabled
- Re-Size BAR Support : Enabled
ドライバーのインストール
インテル® Arc™ & Iris® Xe グラフィックス - WHQL - Windows*
- 2023-02-18現在
- 最新バージョン : 31.0.101.4091
ベータはちょっと怖かったんで、後1.1GBはデカすぎ…
- インストールされるコンポーネント一覧(下2つは勝手に常駐になるのでスタートアップから切った方がヘルシー?)
- Intel® Graphics Driver
- Intel® Media SDK Runtime (21.0.1.35)
- Intel® oneVPL GPU Runtime (21.0.2.8)
- Intel® Graphics Compute Runtime for OpenCL* Driver
- Vulkan*3 Runtime Installer
- Intel® Graphics Driver Installer (1.0.734)
- oneAPI Level Zero Loader and Validation Layer
- Intel® Graphics Compute Runtime for OneAPI Level Zero specification
- Intel® Arc™ Control installer (1.64.4583.3)
- Intel® Driver Support Assistant
消費電力
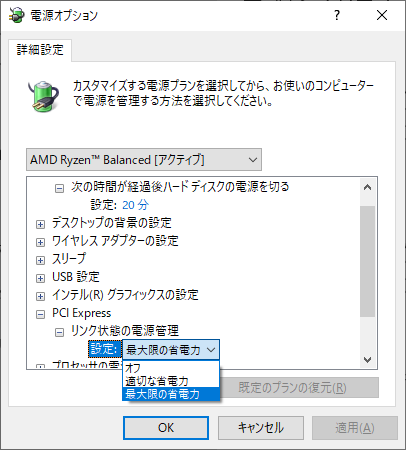
アイドル時の消費電力

| 状態 |
設定 |
システム全体の消費電力 |
| idle |
適切な省電力 |
71W |
| idle |
最大限の省電力 |
63W |
※Ryzen5 3500, DDR4-2666 16GBx2 1.2V, AsRock AB350M_HDV(PCIe 3.0まで), WD SN570 1TB, Intel ARC A750, Win10 Home, KB/Mouse/有線LAN で計測
負荷時の消費電力
PowerLimitの設定機能
- Intel ARC Controlアプリに消費電力を制限する機能があった

- [パフォーマンス]->[パフォーマンスの調整]
- システム起動時に設定を適用 : ON
- GPU コア電源制限 : 190W [95, 228]
- 設定を95W, 190Wに変えたときの消費電力やベンチ結果を以下に示す
HWiNFOの数値
| 状態 |
設定 |
HWiNFOの数値 |
動作周波数 |
ファン回転数 |
温度 |
| idle |
- |
36W |
600MHz |
900rpm |
58℃ |
| 実行中 |
95W |
95W |
1500MHz |
1260rpm |
78℃ |
| 実行中 |
190W |
162W |
2400MHz |
1280rpm |
90℃ |
- geekbench6 computeを実行(geekbench5 computeより処理が多少長いため)
- ワットチェッカーの表示更新頻度が1秒に1回ぐらいなのでピーク電力を捕らえきれていない点に注意
| 状態 |
設定 |
ワットチェッカーの数値 |
| idle |
- |
63W |
| 実行中 |
95W |
166W |
| 実行中 |
190W |
235W |
- luxmark-v3.1
- 95W設定 : 42823
- 190W設定 : 52107
- geekbench5
- 95W設定 : 88501
- 190W設定 : 89831
- 処理が短すぎてPL設定の影響がほとんどないように見える
- geekbench6
- ACM-G10 : 600 / 2050MHz : Max 14.7TFlops
- 7 * 4 * 16 = 448 EU/XVE
- 448 * 8 = 3584 ALU
- 7 * 4 = 28 Ray Tracing Unit
- ray-box intersection : 28 * 12 = 336 test/clock
- ray-triangle intersection : 28 * 1 = 28 test/clock
- 2同時ムービーエンコード・デコード
- メモリー : 8GB GDDR6
- TBP(Total Board Power) : 225W
- RenderSlice : x7
- Xe-core : x4
- XVE(Xe Vector Engine) : x16
- XMX(Xe MatriX engine) : x16
- Load/Store
- I$
- L1$/SLM(Shared Local Memory)
- TSU(Thread Sorting Unit)
- RTU(Ray Tracing Unit)
- ray-box intersection
- ray-triangle intersection
- Graphics Backend
- Sampler : x4
- Geometry
- Rasterizer
- HiZ
- Pixel Backend : x2
- L2$
- Xe Media Engine
- MFX(encoder/decoder) : x2
- Global Dispatch
- Display Engine
- Copy Engine
- Memory Controller(GDDR6)
- PCI Express(Gen4)
Note that an Intel GPU device is equipped with many Vector Engines (VEs), and each VE is a multi-threaded SIMD processor. >Compiler generates SIMD code to map several work-items to be executed simultaneously within a given hardware thread. The >SIMD-width for a kernel is a heuristic driven compiler choice. Common SIMD-width examples are SIMD-8, SIMD-16, and >SIMD-32.
For a given SIMD-width, if all kernel instances within a thread are executing the same instruction, the SIMD lanes can be >maximally utilized. If one or more of the kernel instances choose a divergent branch, then the thread executes the two paths of >the branch and merges the results by mask. The VE’s branch unit keeps track of such branch divergence and branch nesting.
IntelのGPUデバイスは多数のベクターエンジン(VE)、また各VEはマルチスレッドのSIMDプロセッサを備えています。
コンパイラはSIMDコードをハードウェアスレッドで同時実行されるいくつかのワークアイテムにマッピングします。
そのカーネルのSIMD幅は、コンパイラによるヒューリスティックな選択次第で、SIMD-8, SIMD-16, SIMD-32があります。
SIMD幅が定まると、スレッドに含まれるすべてのカーネルインスタンスは同じ命令を実行し、SIMDレーンは最大限稼働するでしょう。
1つ以上のカーネルインスタンスがダイバージェントな分岐を選ぶ場合、スレッドは分岐先の両方のパスを実行し、マスクによって結果をマージします。
VEの分岐ユニットはこのような分岐のダイバージェンスと分岐のネストを追跡し続けるのです。
感想
- 8,6pinな大きめグラボを使うのが久しぶりなのでワクワクドキドキ
- バックプレートも全部覆われ、角など縁はゴムカバーで一体感がすごい
- AV1エンコ機能は後々試してみたいです